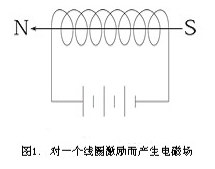
步進電機(jī)的結構和原理(lǐ)
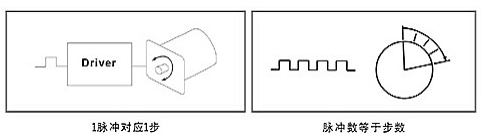
步進電機(jī)是一種專門(mén)用于位置和速度精确控制的特種電機(jī)。步進電機(jī)的最大(dà)特點是其數字性,對于微電腦發過來(lái)的每一個脈沖信号,步進電機(jī)在其驅動器的推動下運轉一個固定角度(簡稱一步),如(rú)下圖所示。如(rú)接收到一串脈沖步進電機(jī)将連續運轉一段相(xiàng)應距離(lí)。同時您可(kě)通過控制脈沖頻率,直接對電機(jī)轉速進行控制。由于步進電機(jī)工(gōng)作(zuò)原理(lǐ)易學易用,成本低(相(xiàng)對于伺服)、電機(jī)和驅動器不易損壞,非常适合于微電腦和單片機(jī)控制,因此近年(nián)來(lái)在各行各業的控制設備中獲得(de)了越來(lái)越廣泛的應用.本文将向用戶簡述步進電機(jī)的基本結構和工(gōng)作(zuò)原理(lǐ),舉例說(shuō)明步進電機(jī)驅動器的工(gōng)作(zuò)原理(lǐ),直線步進電機(jī)的結構和工(gōng)作(zuò)原理(lǐ)。
步進電機(jī)的種類和特點步進電機(jī)在構造上有三種主要類型:反應式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反應式:
定子上有繞組、轉子由軟磁材料組成。結構簡單、成本低、步距角小,可(kě)達1.2、但(dàn)動态性能差、效率低、發熱(rè)大(dà),可(kě)靠性難保證。
永磁式:
永磁式步進電機(jī)的轉子用永磁材料制成,轉子的極數與定子的極數相(xiàng)同。其特點是動态性能好、輸出力矩大(dà),但(dàn)這種電機(jī)精度差,步矩角大(dà)。
混合式:
混合式步進電機(jī)綜合了反應式和永磁式的優點,其定子上有多相(xiàng)繞組、轉子上采用永磁材料,轉子和定子上均有多個小齒以提高步矩精度。其特點是輸出力矩大(dà)、動态性能好,步矩角小,但(dàn)結構複雜、成本相(xiàng)對較高。 按定子上繞組來(lái)分(fēn),共有二相(xiàng)、三相(xiàng)和五相(xiàng)等系列。最受歡迎的是兩相(xiàng)混合式步進電機(jī),約占 97% 以上的市場份額,其原因是性價比高,配上細分(fēn)驅動器後效果良好。該種電機(jī)的基本步矩角爲1.8/步,配上半步驅動器後,步矩角減少爲0.9;,配上細分(fēn)驅動器後其步矩角可(kě)細分(fēn)達256倍。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機(jī)可(kě)配不同細分(fēn)的驅動器以改變精度和效果。
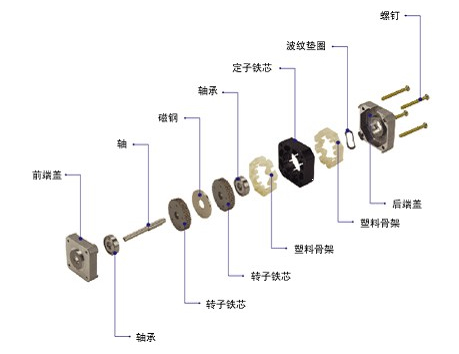
1. 基本結構:
2. 工(gōng)作(zuò)原理(lǐ):簡單的講,步進電機(jī)驅動器根據外來(lái)的脈沖,通過其内部的邏輯電路(lù)控制步進電機(jī)的繞組按一定的次序正反通電,從(cóng)而實現其運轉。以兩相(xiàng)1.8度,步進電機(jī)爲例,
其主要分(fēn)爲4線(雙極性),6線(單極性)兩種方式:
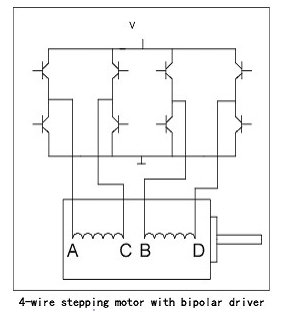
線(雙極性)電機(jī),當其繞組的通電方向順序按照(zhào)AC-BD-CA-DB 四個狀态周而複始進行變化,每變化一次,電機(jī)運轉一步,即1.8度。
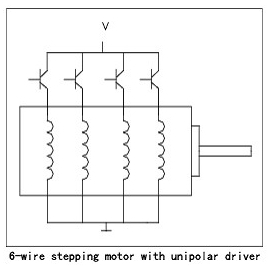
6線(單極性)電機(jī),當其繞組的通電方向順序按照(zhào)OA-OB-OC-OD 四個狀态周而複始進行變化,每變化一次,電機(jī)運轉一步,即1.8度。以上僅僅是一個原理(lǐ)性的介紹,實際的運行中會有很多複雜的情況産生(shēng),其相(xiàng)應的控制方式也有很多種,如(rú)果需要特殊的幫助,可(kě)以和上海運控公司聯系。步進電機(jī)的基本原理(lǐ)
電機(jī)将電能轉換成機(jī)械能,步進電機(jī)将電脈沖轉換成特定的旋轉運動。每個脈沖所産生(shēng)的運動是精确的,并可(kě)重複,這就(jiù)是爲什麽步進電機(jī)在定位應用中如(rú)此有效的原因。
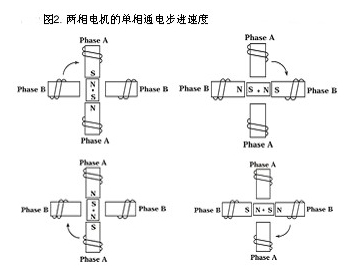
圖2顯示了一個兩相(xiàng)電機(jī)的典型的步進順序。在第1步中,兩相(xiàng)定子中的A相(xiàng)被通電,因異性相(xiàng)吸,其磁場将轉子固定在圖示位
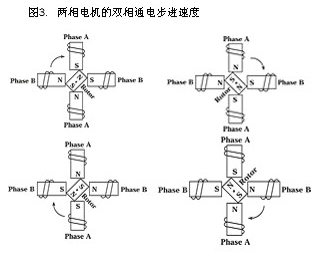
置。當A相(xiàng)關閉、B相(xiàng)被通電時,轉子順時針旋轉90。在第3步中,B相(xiàng)關閉、A相(xiàng)被通電,但(dàn)極性與第1步相(xiàng)反,這促使轉子再次旋轉90。在第4步中,A相(xiàng)關閉、B相(xiàng)通電,極性與第2步相(xiàng)反。重複該順序促使轉子按90;的步距角順時針旋轉。 圖2中顯示的步進順序稱爲單相(xiàng)通電步進。更常用的步進方法是雙相(xiàng)通電,即電機(jī)的兩相(xiàng)一直通電。但(dàn)是,一次隻能轉換一相(xiàng)的極性,見(jiàn)圖3所示。兩相(xiàng)步進時,轉子與定子兩相(xiàng)之間的軸線處對直。由于兩相(xiàng)一直通電,本方法比單相(xiàng)通電步進多提供了41.1%的力矩,但(dàn)輸入功率爲2倍。
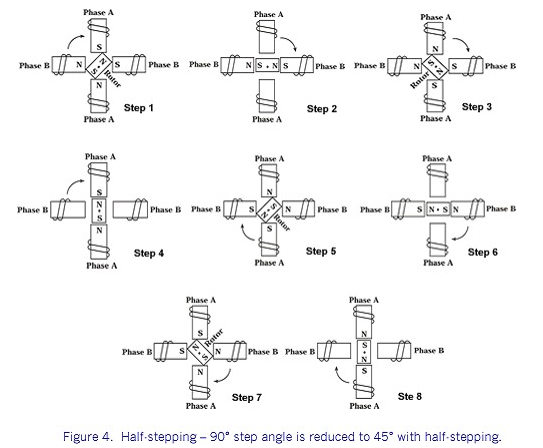
半步步進 電機(jī)也可(kě)以轉換相(xiàng)位之間插入一個關閉狀态而走半步。這将步進電機(jī)的整個步距角一分(fēn)爲二。例如(rú),一個90的步進電機(jī)将每半步移動45,見(jiàn)圖4。但(dàn)是,與兩相(xiàng)通電相(xiàng)比,半步進通常導緻15%-30%的力矩損失(取決于步進速率)。在每交換半步的過程中,由于其中一個繞組沒有通電,所以作(zuò)用在轉子上的電磁力要小,造成了力矩的淨損失。
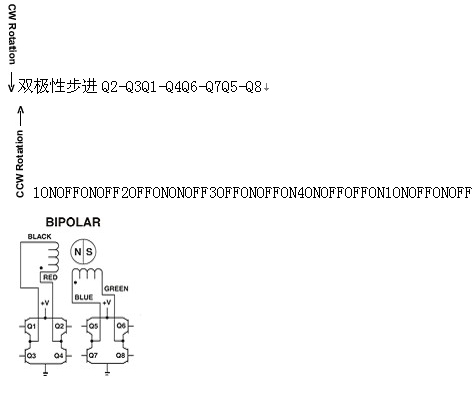
雙極性繞組 二相(xiàng)通電步進順利利用了一種雙極性線圈繞組的方法,每極隻有一個繞組,通過改變繞組中的電流方向,從(cóng)而改變相(xiàng)應極上的電磁極性,典型的兩相(xiàng)雙極驅動的輸出步驟在電器原理(lǐ)圖和下面圖5中的步進順序中有進一步闡述。
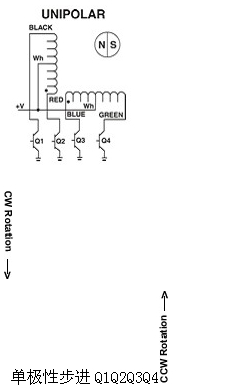
單極性繞組 另一常用繞組是單極性繞組,每個電極上饒有兩個繞組,當一個繞組通電時,産生(shēng)被磁場,另一個繞組通電則産生(shēng)南(nán)磁場,因爲從(cóng)驅動器到線圈的電流不會反向,所以可(kě)稱爲單極性繞組。該方法下電機(jī)的步進順序見(jiàn)圖6所示。通過這種設計(jì)使得(de)電子驅動器簡單化,但(dàn)是與雙極性繞組相(xiàng)比,其力矩大(dà)約小30%,因爲磁線圈僅被利用了一半。
1ONOFFONOFF2OFFONONOFF3OFFONOFFON4ONOFFOFFON1ONOFFONOFF
精度 混合式式步進電機(jī)精确度達3-5%每步,且不累積。一個1.2度的步進電機(jī)每步的誤差會少于0.06度,而且不管走了多少步,這個誤差是不會累積的。
力矩一個特定的旋轉步進電機(jī)所産生(shēng)的力矩是下述參數的函數• 步進速度
• 通過繞組的電流大(dà)小• 所使用的驅動器的類型
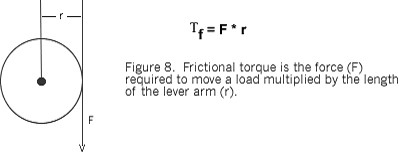
(直線電機(jī)所産生(shēng)的力也取決于這些因素)力矩是摩擦力矩(Tf)和慣性力矩(Ti)之和 摩擦力矩(oz-in或g-cm)爲要求移動一個載荷的力(單位爲oz或g)乘以用于驅動載荷的力臂(r)長度(單位爲in或cm)(見(jiàn)圖8所示)。
摩擦力矩(oz-in或g-cm)爲要求移動一個載荷的力(單位爲oz或g)乘以用于驅動載荷的力臂(r)長度(單位爲in或cm)(見(jiàn)圖8所示)。
慣性力矩(Ti)是用于加速負載(單位爲:g-cm2)而需要的力矩其中:
I=轉動慣量,單位: g-cm2w=步進速率,單位:步數/秒
t=時間,單位:秒
θ=步距角度,單位:度
常數:93.73 應該注意到的是,當電機(jī)的步進頻率增加時,電機(jī)的反向電動勢(EMF)也增加,限制了電流的增大(dà),并導緻可(kě)使用的輸出力矩的減少。 步進電機(jī)驅動器的工(gōng)作(zuò)原理(lǐ)步進電機(jī)在控制系統中具有廣泛的應用。它可(kě)以把脈沖信号轉換成角位移,并且可(kě)用作(zuò)電磁制動輪、電磁差分(fēn)器、或角位移發生(shēng)器等。 有時從(cóng)一些舊設備上拆下的步進電機(jī)(這種電機(jī)一般沒有損壞)要改作(zuò)它用,一般需自(zì)己設計(jì)驅動器。本文介紹的就(jiù)是爲從(cóng)一日(rì)本産舊式打印機(jī)上拆下的步進電機(jī)而設計(jì)的驅動器。本文先介紹該步進電機(jī)的工(gōng)作(zuò)原理(lǐ),然後介紹了其驅動器的軟、硬件(jiàn)設計(jì)。 1. 步進電機(jī)的工(gōng)作(zuò)原理(lǐ) 該步進電機(jī)爲一四相(xiàng)步進電機(jī),采用單極性直流電源供電。隻要對步進電機(jī)的各相(xiàng)繞組按合适的時序通電,就(jiù)能使步進電機(jī)步進轉動。圖1是該四相(xiàng)反應式步進電機(jī)工(gōng)作(zuò)原理(lǐ)示意圖。 圖1 四相(xiàng)步進電機(jī)步進示意圖
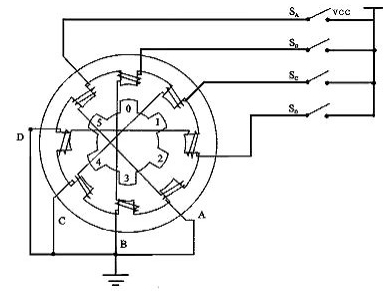
開始時,開關SB接通電源,SA、SC、SD斷開,B相(xiàng)磁極和轉子0、3号齒對齊,同時,轉子的1、4号齒就(jiù)和C、D相(xiàng)繞組磁極産生(shēng)錯齒,2、5号齒就(jiù)和D、A相(xiàng)繞組磁極産生(shēng)錯齒。 當開關SC接通電源,SB、SA、SD斷開時,由于C相(xiàng)繞組的磁力線和1、4号齒之間磁力線的作(zuò)用,使轉子轉動,1、4号齒和C相(xiàng)繞組的磁極對齊。而0、3号齒和A、B相(xiàng)繞組産生(shēng)錯齒,2、5号齒就(jiù)和A、D相(xiàng)繞組磁極
産生(shēng)錯齒。依次類推,A、B、C、D四相(xiàng)繞組輪流供電,則轉子會沿着A、B、C、D方向轉動。 四相(xiàng)步進電機(jī)按照(zhào)通電順序的不同,可(kě)分(fēn)爲單四拍(pāi)、雙四拍(pāi)、八拍(pāi)三種工(gōng)作(zuò)方式。單四拍(pāi)與雙四拍(pāi)的步距角相(xiàng)等,但(dàn)單四拍(pāi)的轉動力矩小。八拍(pāi)工(gōng)作(zuò)方式的步距角是單四拍(pāi)與雙四拍(pāi)的一半,因此,八拍(pāi)工(gōng)作(zuò)方式既可(kě)以保持較高的轉動力矩又可(kě)以提高控制精度。
常鋒簡介
企業簡介
新聞中心
常鋒動态
技術(shù)交流
技術(shù)交流
人(rén)才招聘
人(rén)才招聘
常州市常鋒電機有限公司
中國(guó)江蘇常州天甯區鳳凰路(lù)38号采菱科(kē)技園5#樓
電話(huà):0519-88388393(廣告勿擾)
郵箱:changfengmotor@sina.com (銷售)
info@cfemotor.com (銷售)
trista@cfemotor.com (外貿)
engineering@cfemotor.com(技術(shù)支持)


