步進電機(jī)的結構和原理(lǐ)
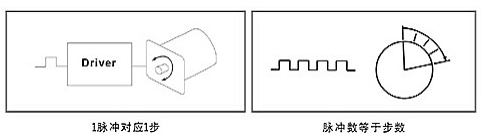
步進電機(jī)是一種專門(mén)用于位置和速度精确控制的特種電機(jī)。步進電機(jī)的最大(dà)特點是其數字性,對于微電腦發過來(lái)的每一個脈沖信号,步進電機(jī)在其驅動器的推動下運轉一個固定角度(簡稱一步),如(rú)下圖所示。如(rú)接收到一串脈沖步進電機(jī)将連續運轉一段相(xiàng)應距離(lí)。同時您可(kě)通過控制脈沖頻率,直接對電機(jī)轉速進行控制。由于步進電機(jī)工(gōng)作(zuò)原理(lǐ)易學易用,成本低(相(xiàng)對于伺服)、電機(jī)和驅動器不易損壞,非常适合于微電腦和單片機(jī)控制,因此近年(nián)來(lái)在各行各業的控制設備中獲得(de)了越來(lái)越廣泛的應用.本文将向用戶簡述步進電機(jī)的基本結構和工(gōng)作(zuò)原理(lǐ),舉例說(shuō)明步進電機(jī)驅動器的工(gōng)作(zuò)原理(lǐ),直線步進電機(jī)的結構和工(gōng)作(zuò)原理(lǐ)。
步進電機(jī)的種類和特點步進電機(jī)在構造上有三種主要類型:反應式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反應式:
定子上有繞組、轉子由軟磁材料組成。結構簡單、成本低、步距角小,可(kě)達1.2、但(dàn)動态性能差、效率低、發熱(rè)大(dà),可(kě)靠性難保證。
永磁式:
永磁式步進電機(jī)的轉子用永磁材料制成,轉子的極數與定子的極數相(xiàng)同。其特點是動态性能好、輸出力矩大(dà),但(dàn)這種電機(jī)精度差,步矩角大(dà)。
混合式:
混合式步進電機(jī)綜合了反應式和永磁式的優點,其定子上有多相(xiàng)繞組、轉子上采用永磁材料,轉子和定子上均有多個小齒以提高步矩精度。其特點是輸出力矩大(dà)、動态性能好,步矩角小,但(dàn)結構複雜、成本相(xiàng)對較高。 按定子上繞組來(lái)分(fēn),共有二相(xiàng)、三相(xiàng)和五相(xiàng)等系列。最受歡迎的是兩相(xiàng)混合式步進電機(jī),約占 97% 以上的市場份額,其原因是性價比高,配上細分(fēn)驅動器後效果良好。該種電機(jī)的基本步矩角爲1.8/步,配上半步驅動器後,步矩角減少爲0.9;,配上細分(fēn)驅動器後其步矩角可(kě)細分(fēn)達256倍。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機(jī)可(kě)配不同細分(fēn)的驅動器以改變精度和效果。
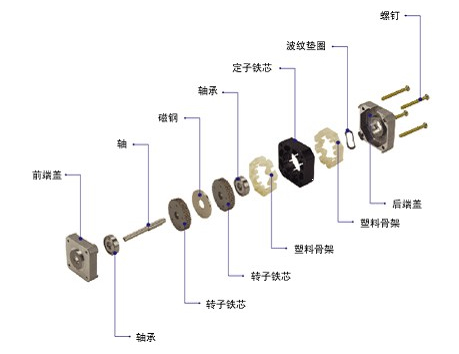
1. 基本結構:
2. 工(gōng)作(zuò)原理(lǐ):簡單的講,步進電機(jī)驅動器根據外來(lái)的脈沖,通過其内部的邏輯電路(lù)控制步進電機(jī)的繞組按一定的次序正反通電,從(cóng)而實現其運轉。以兩相(xiàng)1.8度,步進電機(jī)爲例,
其主要分(fēn)爲4線(雙極性),6線(單極性)兩種方式:
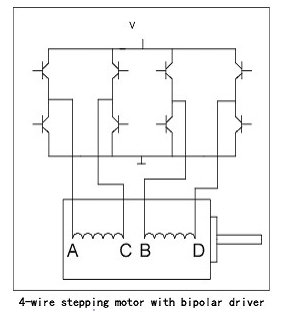
線(雙極性)電機(jī),當其繞組的通電方向順序按照(zhào)AC-BD-CA-DB 四個狀态周而複始進行變化,每變化一次,電機(jī)運轉一步,即1.8度。
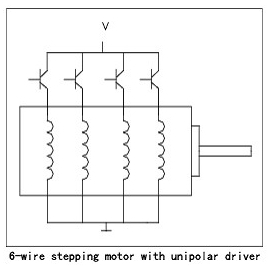
6線(單極性)電機(jī),當其繞組的通電方向順序按照(zhào)OA-OB-OC-OD 四個狀态周而複始進行變化,每變化一次,電機(jī)運轉一步,即1.8度。以上僅僅是一個原理(lǐ)性的介紹,實際的運行中會有很多複雜的情況産生(shēng),其相(xiàng)應的控制方式也有很多種,如(rú)果需要特殊的幫助,可(kě)以和上海運控公司聯系。步進電機(jī)的基本原理(lǐ)
電機(jī)将電能轉換成機(jī)械能,步進電機(jī)将電脈沖轉換成特定的旋轉運動。每個脈沖所産生(shēng)的運動是精确的,并可(kě)重複,這就(jiù)是爲什麽步進電機(jī)在定位應用中如(rú)此有效的原因。
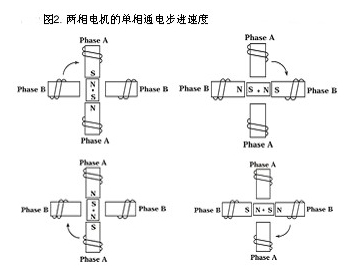
圖2顯示了一個兩相(xiàng)電機(jī)的典型的步進順序。在第1步中,兩相(xiàng)定子中的A相(xiàng)被通電,因異性相(xiàng)吸,其磁場将轉子固定在圖示位
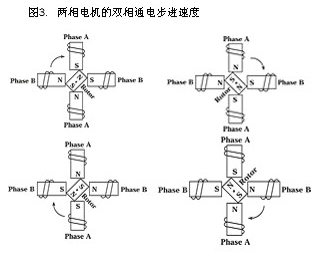
置。當A相(xiàng)關閉、B相(xiàng)被通電時,轉子順時針旋轉90。在第3步中,B相(xiàng)關閉、A相(xiàng)被通電,但(dàn)極性與第1步相(xiàng)反,這促使轉子再次旋轉90。在第4步中,A相(xiàng)關閉、B相(xiàng)通電,極性與第2步相(xiàng)反。重複該順序促使轉子按90;的步距角順時針旋轉。 圖2中顯示的步進順序稱爲單相(xiàng)通電步進。更常用的步進方法是雙相(xiàng)通電,即電機(jī)的兩相(xiàng)一直通電。但(dàn)是,一次隻能轉換一相(xiàng)的極性,見(jiàn)圖3所示。兩相(xiàng)步進時,轉子與定子兩相(xiàng)之間的軸線處對直。由于兩相(xiàng)一直通電,本方法比單相(xiàng)通電步進多提供了41.1%的力矩,但(dàn)輸入功率爲2倍。
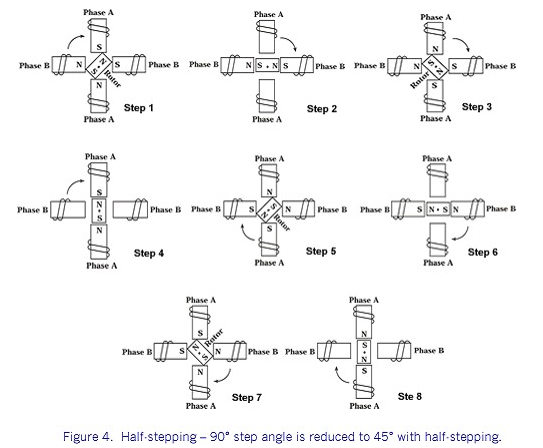
半步步進 電機(jī)也可(kě)以轉換相(xiàng)位之間插入一個關閉狀态而走半步。這将步進電機(jī)的整個步距角一分(fēn)爲二。例如(rú),一個90的步進電機(jī)将每半步移動45,見(jiàn)圖4。但(dàn)是,與兩相(xiàng)通電相(xiàng)比,半步進通常導緻15%-30%的力矩損失(取決于步進速率)。在每交換半步的過程中,由于其中一個繞組沒有通電,所以作(zuò)用在轉子上的電磁力要小,造成了力矩的淨損失。
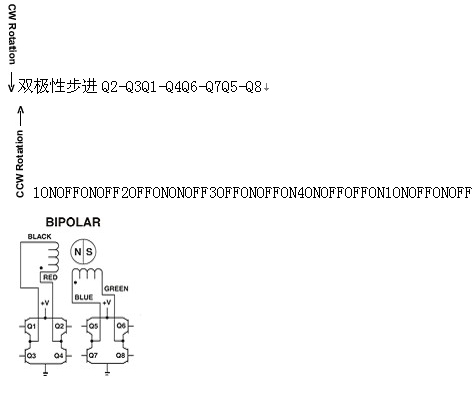
雙極性繞組 二相(xiàng)通電步進順利利用了一種雙極性線圈繞組的方法,每極隻有一個繞組,通過改變繞組中的電流方向,從(cóng)而改變相(xiàng)應極上的電磁極性,典型的兩相(xiàng)雙極驅動的輸出步驟在電器原理(lǐ)圖和下面圖5中的步進順序中有進一步闡述。
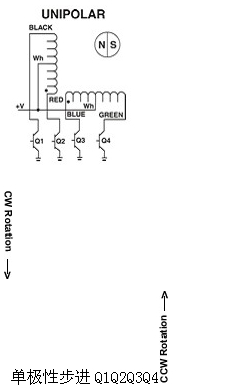
單極性繞組 另一常用繞組是單極性繞組,每個電極上饒有兩個繞組,當一個繞組通電時,産生(shēng)被磁場,另一個繞組通電則産生(shēng)南(nán)磁場,因爲從(cóng)驅動器到線圈的電流不會反向,所以可(kě)稱爲單極性繞組。該方法下電機(jī)的步進順序見(jiàn)圖6所示。通過這種設計(jì)使得(de)電子驅動器簡單化,但(dàn)是與雙極性繞組相(xiàng)比,其力矩大(dà)約小30%,因爲磁線圈僅被利用了一半。
1ONOFFONOFF2OFFONONOFF3OFFONOFFON4ONOFFOFFON1ONOFFONOFF
精度 混合式式步進電機(jī)精确度達3-5%每步,且不累積。一個1.2度的步進電機(jī)每步的誤差會少于0.06度,而且不管走了多少步,這個誤差是不會累積的。
力矩一個特定的旋轉步進電機(jī)所産生(shēng)的力矩是下述參數的函數• 步進速度
• 通過繞組的電流大(dà)小• 所使用的驅動器的類型
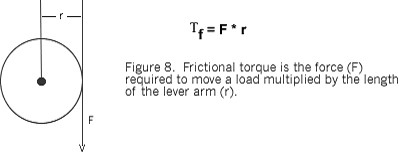
(直線電機(jī)所産生(shēng)的力也取決于這些因素)力矩是摩擦力矩(Tf)和慣性力矩(Ti)之和 摩擦力矩(oz-in或g-cm)爲要求移動一個載荷的力(單位爲oz或g)乘以用于驅動載荷的力臂(r)長度(單位爲in或cm)(見(jiàn)圖8所示)。
摩擦力矩(oz-in或g-cm)爲要求移動一個載荷的力(單位爲oz或g)乘以用于驅動載荷的力臂(r)長度(單位爲in或cm)(見(jiàn)圖8所示)。
慣性力矩(Ti)是用于加速負載(單位爲:g-cm2)而需要的力矩其中:
I=轉動慣量,單位: g-cm2w=步進速率,單位:步數/秒
t=時間,單位:秒
θ=步距角度,單位:度
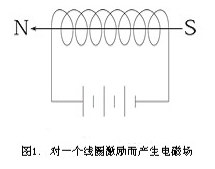
常數:93.73 應該注意到的是,當電機(jī)的步進頻率增加時,電機(jī)的反向電動勢(EMF)也增加,限制了電流的增大(dà),并導緻可(kě)使用的輸出力矩的減少。 步進電機(jī)驅動器的工(gōng)作(zuò)原理(lǐ)步進電機(jī)在控制系統中具有廣泛的應用。它可(kě)以把脈沖信号轉換成角位移,并且可(kě)用作(zuò)電磁制動輪、電磁差分(fēn)器、或角位移發生(shēng)器等。 有時從(cóng)一些舊設備上拆下的步進電機(jī)(這種電機(jī)一般沒有損壞)要改作(zuò)它用,一般需自(zì)己設計(jì)驅動器。本文介紹的就(jiù)是爲從(cóng)一日(rì)本産舊式打印機(jī)上拆下的步進電機(jī)而設計(jì)的驅動器。本文先介紹該步進電機(jī)的工(gōng)作(zuò)原理(lǐ),然後介紹了其驅動器的軟、硬件(jiàn)設計(jì)。 1. 步進電機(jī)的工(gōng)作(zuò)原理(lǐ) 該步進電機(jī)爲一四相(xiàng)步進電機(jī),采用單極性直流電源供電。隻要對步進電機(jī)的各相(xiàng)繞組按合适的時序通電,就(jiù)能使步進電機(jī)步進轉動。圖1是該四相(xiàng)反應式步進電機(jī)工(gōng)作(zuò)原理(lǐ)示意圖。 圖1 四相(xiàng)步進電機(jī)步進示意圖
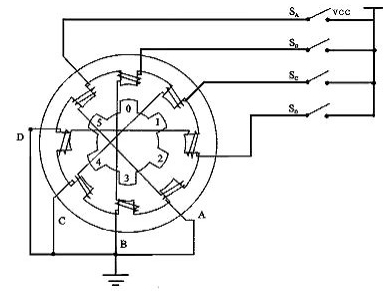
開始時,開關SB接通電源,SA、SC、SD斷開,B相(xiàng)磁極和轉子0、3号齒對齊,同時,轉子的1、4号齒就(jiù)和C、D相(xiàng)繞組磁極産生(shēng)錯齒,2、5号齒就(jiù)和D、A相(xiàng)繞組磁極産生(shēng)錯齒。 當開關SC接通電源,SB、SA、SD斷開時,由于C相(xiàng)繞組的磁力線和1、4号齒之間磁力線的作(zuò)用,使轉子轉動,1、4号齒和C相(xiàng)繞組的磁極對齊。而0、3号齒和A、B相(xiàng)繞組産生(shēng)錯齒,2、5号齒就(jiù)和A、D相(xiàng)繞組磁極
産生(shēng)錯齒。依次類推,A、B、C、D四相(xiàng)繞組輪流供電,則轉子會沿着A、B、C、D方向轉動。 四相(xiàng)步進電機(jī)按照(zhào)通電順序的不同,可(kě)分(fēn)爲單四拍(pāi)、雙四拍(pāi)、八拍(pāi)三種工(gōng)作(zuò)方式。單四拍(pāi)與雙四拍(pāi)的步距角相(xiàng)等,但(dàn)單四拍(pāi)的轉動力矩小。八拍(pāi)工(gōng)作(zuò)方式的步距角是單四拍(pāi)與雙四拍(pāi)的一半,因此,八拍(pāi)工(gōng)作(zuò)方式既可(kě)以保持較高的轉動力矩又可(kě)以提高控制精度。
ABOUT US
About Us
PRODUCTS
Stepping motor and driver series
Servo motor and driver series
Brushless motor and drive series
Deceleration stepper motor
Special motor
NEWS
Changfeng News
TECHNICAL SERVICE
Technical Service
JOIN US
Join Us
Changzhou Changfeng Motor Co., Ltd.
Add: No.5, Cailing S&C park, NO.38 Fenghuang Rd., Tianning, Changzhou, Jiangsu Prov., China
Tel: +86 519 88388393
Whatsapp 1: +86 13912336890
Whatsapp 2: +86 18706126622
Email1:info@cfemotor.com
Email2:trista@cfemotor.com